An electric motor turns electricity into motion, and the trick behind it is almost embarrassingly simple: push a current through a wire sitting in a magnetic field, and the wire gets shoved sideways. Scale that shove up, make it spin instead of just push, and you’ve got the thing that runs your fridge compressor, your cordless drill, the fan in your laptop, and the front axle of a Tesla.
The principle hasn’t changed since Michael Faraday demonstrated it in 1821. What’s changed is everything around it — the magnets, the control electronics, the materials — which is why a motor the size of a soda can now does work that used to need something the size of a beer keg.
This is the full picture: how electric motors work, the main types and when each one makes sense, how to size and pick one, and how to keep it running. No prior engineering required.
Table of Contents
- The core principle: current plus magnetism equals torque
- The parts: stator, rotor, and the rest
- Types of electric motors
- AC vs DC: the real difference
- Brushed vs brushless
- Where electric motors actually show up
- How to choose a motor
- Maintenance and the failure modes that kill motors
- FAQ
The core principle: current plus magnetism equals torque

Every electric motor runs on one fact of physics: a current-carrying wire inside a magnetic field feels a force. This is the Lorentz force, and the direction it points follows the right-hand rule that the IEEE and every physics text agree on. Point your fingers along the current, curl them toward the magnetic field, and your thumb shows the push.
A single straight wire just gets pushed once and stops. To get continuous rotation, you bend the wire into a loop and put it on an axle. Now one side of the loop gets pushed up while the other gets pushed down, and the loop rotates. The problem: half a turn later, the same forces would push it back. So you need a way to flip the current at exactly the right moment — and how a motor handles that flip is the single biggest thing that separates one motor type from another.
That’s really the whole secret. Everything else — the copper, the steel, the silicon controller — exists to make that push stronger, smoother, and more controllable.
The parts: stator, rotor, and the rest
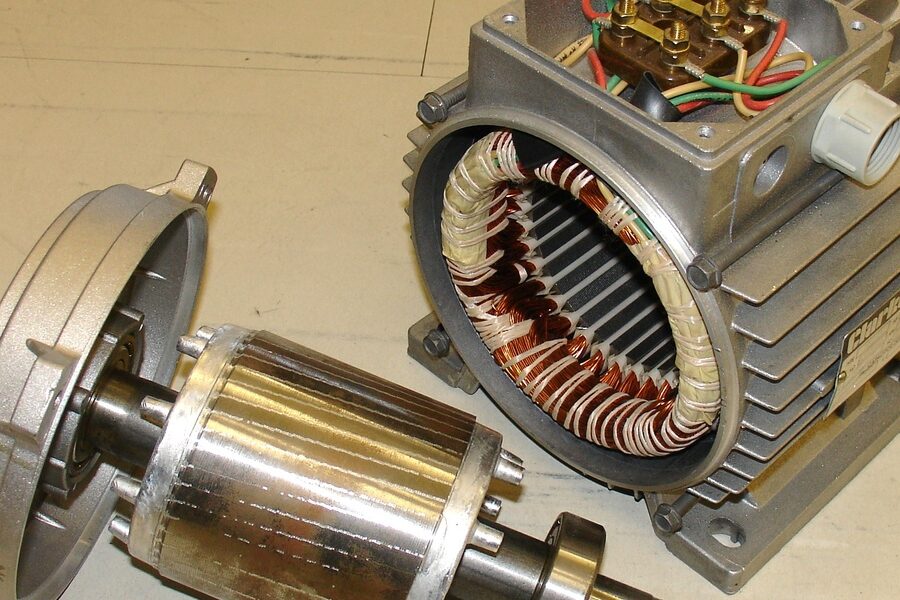
Strip any motor down and you find the same two characters.
The stator is the part that stays still (stator → stationary, easy to remember). It’s the outer shell, usually a stack of thin steel laminations wound with copper coils. The rotor is the part that spins, sitting inside the stator and connected to the output shaft.
One of these two creates a fixed magnetic field; the other creates a rotating or switching one. The interaction between them is what produces torque. The supporting cast:
- Windings — the copper coils that carry current and become electromagnets. Copper earns its place here for its conductivity, the same property behind so many of its other electrical uses across industry.
- Air gap — the tiny space between rotor and stator, often under a millimeter. Smaller gap, stronger coupling, more torque. It’s also why a bent shaft destroys a motor: the rotor scrapes the stator.
- Bearings — let the rotor spin freely. The single most common mechanical failure point.
- Commutator and brushes (brushed motors only) — the mechanical switch that flips current direction as the rotor turns.
Thin steel laminations instead of a solid block, by the way, aren’t an aesthetic choice. A solid iron core would let stray “eddy currents” swirl around inside it and bleed off energy as heat. Stacking insulated sheets breaks those loops up. It’s the same reason a transformer core is laminated.
Types of electric motors
The family tree splits first by the kind of power they eat — alternating current (AC) or direct current (DC) — and then by how they generate the rotating field. Here’s the map before the detail.
| Type | Power | How it commutates | Best at | Typical home |
|---|---|---|---|---|
| AC induction | AC | No commutation; rotor field is induced | Cheap, rugged, runs forever | Pumps, fans, compressors, industrial |
| AC synchronous | AC | Rotor locked to supply frequency | Constant exact speed | Clocks, grid equipment, large drives |
| Brushed DC | DC | Mechanical brushes + commutator | Simple speed control, cheap | Toys, car windows, hand tools |
| Brushless DC (BLDC) | DC | Electronic controller | Efficiency, power density | Drones, EVs, fans, appliances |
| Stepper | DC pulses | Controller, one step at a time | Precise positioning | Printers, CNC, robotics |
| Universal | AC or DC | Mechanical brushes | High speed, high power, small | Vacuums, drills, blenders |
A few of these deserve a closer look.
AC induction motors are the workhorses of the planet. The stator’s AC supply creates a rotating magnetic field, which induces a current in the rotor (no electrical connection to the rotor at all — it works by induction, hence the name). That induced current makes the rotor its own magnet, and it chases the stator’s rotating field. The rotor always lags slightly behind; that lag is called “slip,” and without it the motor would produce zero torque. Dead simple, almost nothing to wear out, and the reason it dominates industry.
Brushless DC motors (BLDC) flipped the script over the last two decades. They put the permanent magnets on the rotor and the windings on the stator, then use an electronic controller to switch the windings in sequence — doing electronically what brushes used to do mechanically. No brushes means no friction sparks, no brush dust, far less wear, and efficiency that routinely clears 90%. The catch is the controller, which adds cost and complexity. Nearly every modern drone, EV traction motor, and quiet appliance fan is BLDC.
Stepper motors trade speed and efficiency for precision. They move in discrete steps — a common one does 1.8 degrees per step, so exactly 200 steps per full revolution. Tell it to take 50 steps and it lands at 90 degrees, no position sensor needed. That open-loop precision is why your 3D printer and old inkjet rely on them.
AC vs DC: the real difference
This is the question that trips people up, so here’s the honest version.
AC motors run on the alternating current that comes out of your wall and the grid. The current already reverses direction 50 or 60 times a second, so an AC motor can use that reversal to create its rotating field with no extra switching hardware. That’s why they’re cheap and reliable.
DC motors run on steady, one-direction current from a battery or a power supply. Because the current doesn’t reverse on its own, a DC motor needs something to do the reversing — either mechanical brushes (brushed DC) or an electronic controller (brushless DC).
The practical takeaway:
- AC wins where you have wall power, want low cost, and can tolerate roughly fixed speed: fans, pumps, big industrial machines.
- DC wins where you have a battery or need fine speed and torque control: vehicles, robotics, anything cordless.
The line has blurred, though. Modern EVs technically run AC motors — but they carry a DC battery and use an inverter to synthesize AC on the fly, with a controller deciding the frequency. So the “AC vs DC” label tells you less than it used to. What matters now is the control electronics wrapped around the motor.
Brushed vs brushless
Inside the DC world, this is the split that actually affects your wallet and your maintenance schedule.
A brushed motor uses two carbon blocks (brushes) pressing against a segmented copper ring (the commutator) on the rotor. As the rotor spins, the brushes slide from segment to segment, mechanically flipping the current direction at the right instant. It’s elegant, it’s been around since the 1800s, and it needs nothing but DC power to run. The downside: those brushes physically wear down, throw off carbon dust, and spark — which is why a cheap drill smells faintly of ozone under load.
A brushless motor moves the magnets to the rotor and the coils to the stator, then hands the switching job to a small computer. Nothing rubs, nothing wears, nothing sparks.
| Brushed | Brushless | |
|---|---|---|
| Upfront cost | Lower | Higher (needs controller) |
| Efficiency | 75–80% typical | 85–90%+ |
| Maintenance | Replace brushes periodically | Effectively none |
| Lifespan | Limited by brush wear | Limited by bearings |
| Noise/sparking | More | Minimal |
| Control | Simple | Precise, programmable |
If a device is cheap, disposable, or rarely used, brushed still wins on price. If it runs a lot, needs to be efficient, or must be quiet, brushless earns its premium. That math is exactly why power tool brands switched their premium lines to brushless: the runtime gain off a single battery charge is real and measurable.
Where electric motors actually show up
Worth zooming out, because the scale is genuinely hard to picture. Electric motors consume something like 45% of the world’s electricity, the majority of it in industrial pumps, fans, and compressors. They are quietly the single biggest electrical load on Earth.
- Industrial — conveyor belts, pumps, machine tools, HVAC blowers. Almost all AC induction, sized from fractions of a horsepower to thousands.
- Appliances — your washing machine, dishwasher pump, refrigerator compressor, range hood. A mix, trending toward BLDC for efficiency ratings.
- Electric vehicles — traction motors, usually permanent-magnet AC or induction, paired with an inverter. This is the fastest-growing slice and where most motor R&D money now goes.
- Electronics and small gear — cooling fans, hard drives, drones, camera gimbals. Almost entirely BLDC and stepper.
- Marine and aerospace — electric outboards, control surface actuators, increasingly electric propulsion.
The breadth is easier to appreciate once you see the machines side by side, and this rundown of real-world examples of electric motors spans everything from fractional-horsepower fans to industrial drives.
How to choose a motor
If you’re specifying a motor — for a project, a replacement, or just to understand a spec sheet — five numbers do most of the work.
-
Torque — the rotational force, in newton-meters (N·m) or inch-pounds. This is what gets a load moving and holds it against resistance. Match it to the heaviest thing the motor must turn, with margin. Undersizing torque is the classic mistake; the motor stalls, overheats, and dies.
-
Speed (RPM) — how fast the shaft turns. A motor’s torque and speed trade off against each other, so check the torque at your operating speed, not the headline number.
-
Power (watts or horsepower) — roughly torque times speed. One horsepower is 746 watts, a conversion worth memorizing because spec sheets switch units without warning.
-
Voltage and current — must match your supply. A 12V motor on a 24V supply will run hot and fast until it doesn’t.
-
Duty cycle — continuous or intermittent? A motor rated for 30 minutes on, 30 off will cook itself if you run it nonstop. Continuous-duty (S1) ratings cost more for a reason.
After the numbers, the form factor: mounting style (foot, flange, face), shaft diameter, and the enclosure rating. That last one matters more than people expect. An open motor in a dusty workshop or wet pump room fails early; you want a sealed rating (look for an IP code or a TEFC — totally enclosed, fan-cooled — designation) for anything harsh.
One rule of thumb that saves grief: size for the starting load, not the running load. Many machines need several times their running torque just to break free from a standstill, and a motor that’s perfect once it’s spinning can fail to start at all.
Maintenance and the failure modes that kill motors
Electric motors are absurdly reliable, which is exactly why they get neglected until they fail at the worst possible moment. The good news: most failures announce themselves first.
Bearings cause more than half of all motor failures. They’re the only continuously moving wear part in a brushless motor. The warning sign is sound — a healthy motor hums; a failing bearing whines, grinds, or rumbles. Catch it early and a bearing swap is cheap. Ignore it and the rotor eventually drops into the stator and welds itself.
Heat is the silent killer. Every 10°C above the rated temperature roughly halves the life of the winding insulation. Overheating comes from overload, blocked ventilation, or running outside the duty cycle. A motor too hot to keep your hand on is usually telling you something.
Moisture and contamination degrade insulation and corrode bearings. This is where that enclosure rating from the previous section pays off.
Brush wear (brushed motors only) is predictable and visible. Pull the brushes, check the length against the manufacturer’s minimum, replace as a set. If you see deep scoring on the commutator or heavy sparking, the brushes were left in too long.
The practical maintenance kit for a motor you care about:
- Listen for bearing noise at every opportunity. Sound is your earliest warning.
- Keep the cooling vents clear. A dust-clogged fan shroud is the most common avoidable overheat.
- Check mounting bolts; vibration loosens them, and a loose motor chews its own bearings.
- For brushed motors, inspect brushes on a schedule, not after they fail.
- Don’t over-grease sealed bearings — too much grease traps heat and is as bad as too little, and matching the right lubricant to the bearing matters as much as the amount.
FAQ
How does an electric motor work in one sentence? A current flowing through coils creates a magnetic field that pushes against another magnetic field, and arranging that push around an axle turns it into continuous rotation.
What’s the difference between a motor and a generator? Mostly which direction you run the energy. Push electricity in and a motor gives you motion; spin a motor’s shaft mechanically and it pushes electricity out — now it’s a generator. Many EVs use exactly this to recover energy during braking.
Why are brushless motors more expensive if they have fewer parts? The motor itself is simpler, but it can’t run without an electronic controller to switch the windings. That controller is where the cost and complexity moved.
What kind of motor do electric cars use? Most use either a permanent-magnet AC motor or an AC induction motor, fed by an inverter that turns the battery’s DC into AC. The inverter and its control software are as important to performance as the motor itself.
Can I run a DC motor on AC power, or vice versa? Generally no, with one exception: the “universal” motor (in vacuums and drills) is built to run on either. A standard AC or DC motor on the wrong supply will perform badly or burn out.
Why does my motor get hot? Some warmth is normal. Too hot to touch usually means overload, blocked airflow, or running past its duty cycle — and sustained heat is the fastest way to shorten a motor’s life.
The short version
An electric motor is a current, a magnetic field, and a clever way to keep flipping the push so the shaft keeps turning. AC induction motors run the industrial world on cheap reliability; brushless DC motors run the modern, efficient, battery-powered one. Pick by torque, speed, voltage, and duty cycle — in that order — then size for the starting load, not the running load. And whatever you install, listen to it. A motor almost always tells you it’s dying before it actually does.