On production floors, in lab benches and inside consumer gadgets, devices that convert signals into motion are everywhere — opening valves, positioning optics, and driving conveyors. A little knowledge about those components makes specification, maintenance, and design work faster and less error-prone.
There are 24 Actuators, ranging from AC induction motor to Voice coil actuator, spanning heavy industrial drives to precision micropositioners. For each item the information is organized as Principle,Typical output (N / N·m / mm),Common applications so you can compare specs at a glance — you’ll find below.
How do I choose the right actuator for my project?
Start with the requirements: required force/torque or stroke, speed, precision, duty cycle, and the operating environment (temperature, contamination, explosion risk). Match those to power source and control needs (electrical, pneumatic, hydraulic) and consider mounting, size, and feedback options. Use the Principle and Typical output (N / N·m / mm) columns below to narrow candidates quickly.
Can one actuator type be swapped for another in an existing system?
Sometimes, but check mechanical interface, available power/drive electronics, control method, and performance (force, speed, stiffness). Replacements often need adapters, different drivers or gearboxes, and verification that the new type suits the application listed under Common applications — consult the entries below before changing hardware.
Actuators
| Name | Principle | Typical output (N / N·m / mm) | Common applications |
|---|---|---|---|
| Electric motor | Electromagnetic rotation (Lorentz force) | 0.01-5,000 N·m | Fans, pumps, conveyors, vehicles |
| Brushed DC motor | Commutated electromagnetic rotation | 0.01-50 N·m | Hobby devices, small appliances, automotive starters |
| Brushless DC motor (BLDC) | Electronic commutation of permanent magnets | 0.01-200 N·m | Drones, EVs, industrial drives |
| AC induction motor | Electromagnetic induction rotation | 0.5-3,000 N·m | Pumps, compressors, fans, industrial drives |
| Stepper motor | Phased electromagnetic stepping coils | 0.1-10 N·m | 3D printers, CNC, positioning stages |
| Servo motor | Closed-loop electromagnetic rotation with feedback | 0.1-500 N·m | Robotics, CNC, aerospace control surfaces |
| Linear electric actuator (screw) | Motor-driven screw converts rotation to linear motion | 10-1,000 mm | Adjustable furniture, industrial presses, valve actuators |
| Linear motor (direct-drive) | Linear electromagnetic Lorentz force | 10-2,000 mm | High-speed stages, maglev, pick-and-place systems |
| Voice coil actuator | Direct electromagnetic linear force in gap | 0.1-20 mm | Camera lenses, haptics, vibration control |
| Solenoid actuator | Electromagnetic plunger linear motion | 1-50 mm | Valves, locks, ejectors, solenoid valves |
| Rotary solenoid | Electromagnetic rotary impulse motion | 10-90 degrees | Vending machines, latches, indexing mechanisms |
| Pneumatic cylinder | Compressed-air pressure on piston | 10-50,000 N | Pick-and-place, clamping, doors, automation |
| Pneumatic rotary vane actuator | Air-driven vane produces torque | 5-2,000 N·m | Actuated valves, dampers, simple rotary drives |
| Pneumatic diaphragm actuator | Air pressure flexes diaphragm to move output | 1-50 mm | Control valves, small pumps, pressure regulators |
| Hydraulic cylinder | Fluid pressure on piston provides high force | 1,000-1,000,000 N | Excavators, presses, heavy machinery |
| Hydraulic rotary actuator | Hydraulic fluid-driven torque | 50-50,000 N·m | Winches, slewing tables, steering units |
| Hydraulic servo actuator | Proportional hydraulic valve-controlled actuation | 1,000-500,000 N | Flight controls, industrial presses, test rigs |
| Piezoelectric actuator | Electric field causes crystal strain | 0.001-0.50 mm | Nanopositioning, optics, ultrasonic, inkjet |
| Magnetostrictive actuator | Magnetic field induces material strain | 0.01-5 mm | Sonar, precision valves, vibration control |
| Electrostatic actuator | Electrostatic attraction/repulsion between electrodes | 0.001-0.05 mm | MEMS switches, microvalves, micropositioning |
| Thermal expansion actuator | Heat-induced expansion creates motion | 0.1-50 mm | Thermostats, bimetal switches, slow valves |
| Shape-memory alloy (SMA) actuator | Heat-triggered phase change contraction | 1-10 mm | Micro-actuators, medical devices, valves |
| Electroactive polymer (EAP) actuator | Electric field causes polymer deformation | 1-200 mm | Soft robotics, haptics, adaptive optics |
| MEMS actuator | Microfabricated electrostatic/thermal/piezo actuation | 0.001-0.10 mm | Optical switches, microfluidics, microsensors |
Images and Descriptions
Electric motor
Rotary electromechanical actuator that converts electrical energy into torque using magnetic fields. Ranges from tiny hobby motors to large industrial drives; common in pumps, fans, conveyors, and vehicles. Notable for high efficiency, controllability, and broad power range across many industries.
Brushed DC motor
Classic DC motor with brushes and a commutator that mechanically switch current to generate torque. Simple control and low cost, but brushes wear and limit lifespan. Widely used in toys, small appliances, and legacy automotive starters where simplicity matters.
Brushless DC motor (BLDC)
Permanent-magnet rotor with electronic commutation provides efficient, low-maintenance rotation. Higher power density and longer life than brushed motors; used in drones, electric vehicles, and precise industrial drives. Requires electronic controller but offers excellent torque-to-weight ratio.

AC induction motor
Workhorse for industrial power: rotor currents induced by a rotating magnetic field produce torque. Robust, low-cost, and reliable for fixed-speed and variable-speed applications with VFDs. Dominant in pumps, compressors, HVAC, and factory equipment due to durability.
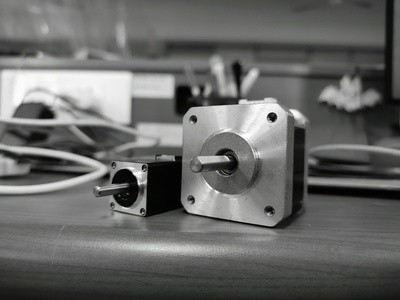
Stepper motor
Open-loop electromechanical actuator that advances in discrete steps via phased coils. Excellent for precise low-speed positioning without feedback in many applications. Limited high-speed torque and resonance issues; commonly found in printers, CNC machines, and camera mounts.
Servo motor
Motor combined with position and velocity feedback plus control electronics to provide accurate motion and torque. Offers precise positioning, fast response, and high torque control. Used in robotics, CNC axes, flight control actuators, and automated machinery.

Linear electric actuator (screw)
Electric motor drives a lead or ball screw to produce linear travel and force. Popular where precise positioning, self-locking, or high force is needed without hydraulics. Found in lab stages, medical beds, factory tooling, and valve control.
Linear motor (direct-drive)
Direct-drive linear actuator that generates force along a straight path using a moving magnetic field and stationary coils, eliminating screws or gears. Extremely responsive with smooth motion and high acceleration, used in precision stages and maglev transport.
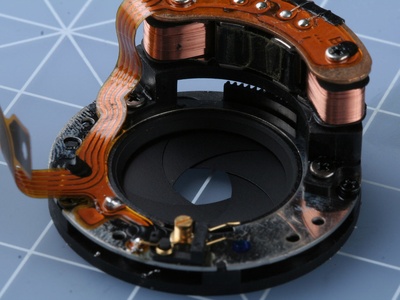
Voice coil actuator
Short-stroke direct-drive actuator where current through a coil in a magnetic gap produces linear force. Fast, low-hysteresis motion ideal for precision focusing, haptic feedback, vibration cancellation, and fine positioning. Limited stroke but excellent bandwidth.
Solenoid actuator
Simple electromagnetic device that pulls or pushes a ferrous plunger when energized. Provides rapid on/off linear motion used in valves, locks, pin ejection, and basic mechanical devices. Cheap and robust but limited precision and continuous force capacity.
Rotary solenoid
Compact actuator that converts electromagnetic pulses into short rotary motion using a slotted rotor or pawl. Useful for small-angle, fast operations like latches and vending mechanisms. Offers simple control but limited angular range and torque.
Pneumatic cylinder
Linear actuator using compressed air to push a piston inside a cylinder producing reliable reciprocating motion. Lightweight, fast, and inexpensive for many automation tasks. Common in factories for clamping, pushing, and cycling operations; requires compressor and air treatment.
Pneumatic rotary vane actuator
Rotary pneumatic device where air pressure on a vane inside a sealed chamber creates torque. Provides compact, high-speed rotation for valve actuation, dampers, and rotary indexing. Generally simple and rugged but less precise than electric servos.
Pneumatic diaphragm actuator
Uses a flexible diaphragm loaded by air pressure to produce linear motion with low friction and good sealing. Common for controlling valves and small pumps where leakage must be minimized. Simple and intrinsically safe for hazardous environments.
Hydraulic cylinder
High-force linear actuator where incompressible fluid pressurizes a piston to generate large thrust. Excellent power density and stiffness for heavy equipment, presses, and lifts. Requires pumps, valves, and maintenance but offers unmatched loads and smooth motion.
Hydraulic rotary actuator
Converts hydraulic flow and pressure into continuous rotary torque using motors or rotary piston mechanisms. Suited to heavy-duty rotational drives like winches and slewing tables. High torque output and robustness but needs hydraulic infrastructure and maintenance.
Hydraulic servo actuator
Combines hydraulic actuation with servo valves and feedback for precise, high-force motion control. Ideal when large forces and fine positioning are both required, such as aerospace controls, metal forming presses, and large test stands. Complex and costly.
Piezoelectric actuator
Materials deform a tiny amount under applied voltage, producing very fast, precise motion with high stiffness. Ideal for nanopositioners, fast valves, ultrasonic transducers, and adaptive optics. Limited stroke but extremely high resolution and bandwidth; often stacked for larger travel.
Magnetostrictive actuator
Certain alloys change length when magnetized, producing robust, high-force linear motion with good bandwidth. Used in sonar, precision valve actuation, and vibration control. Generally offers larger forces than piezo at moderate stroke but needs magnetic biasing.
Electrostatic actuator
Actuation via electric fields pulling closely spaced electrodes together, common in MEMS devices. Extremely low power and CMOS-compatible, but limited force and small displacements. Widely used in microrelays, optical MEMS, and tiny micropositioners.
Thermal expansion actuator
Relies on differential thermal expansion of materials or simple thermal growth to create motion. Simple and reliable for slow or thermostat-like applications; used in thermostats, latches, and thermal trims. Slow response and lower force than pneumatic or hydraulic devices.
Shape-memory alloy (SMA) actuator
Alloys that change crystal structure and shorten when heated, returning on cooling. Provide compact, lightweight linear or bending motion useful in micro-actuators, medical tools, small valves, and deployable structures. Limited cycle life and slower response due to heating.
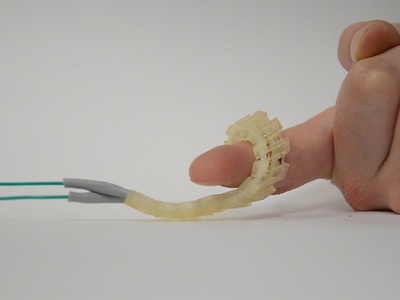
Electroactive polymer (EAP) actuator
Flexible polymers that change shape when electrically stimulated, enabling large strains and biomimetic motion. Attractive for soft robotics, wearable haptics, and adaptive surfaces. Often lower force, may require high voltages, and durability is an active development area.
MEMS actuator
Miniature actuators fabricated with silicon technology that use electrostatic, thermal, piezoelectric, or magnetic effects to move tiny structures. Crucial for optical MEMS, microfluidic valves, and micropositioning. Extremely small force and displacement but enable dense integration and low-power microsystems.