Ball-and-socket joints show up in places that need wide, multi-directional movement and steady support — from the human body to vehicle steering and machinery. Noticing their shapes and constraints makes it easier to understand how motion is generated and controlled across different uses.
There are 14 Examples of Ball-and-Socket Joints, ranging from Automotive ball joint to Total hip replacement. For each entry, data are organized with Category,Location,ROM (°) so you can compare function and range at a glance — you’ll find below.
How do biological and mechanical ball-and-socket joints differ?
Biological joints (like the hip) use cartilage, synovial fluid and soft tissues to allow smooth motion and absorb shock, while mechanical joints rely on metal or polymer bearings, clearances and lubrication; both are rated by range of motion but require different maintenance and failure considerations.
What does the ROM (°) column tell me and how should I use it?
ROM (°) indicates the practical angular range a joint allows; use it to compare mobility between examples, but interpret values alongside Category and Location because load, design and anatomical constraints affect usable motion.
Examples of Ball-and-Socket Joints
| Name | Category | Location | ROM (°) |
|---|---|---|---|
| Shoulder | Human anatomy | Shoulder | multi-axial, ~180° |
| Hip | Human anatomy | Hip | multi-axial, ~120° |
| Total hip replacement | Prosthetic | Hip | multi-axial, ~120° |
| Reverse shoulder arthroplasty | Prosthetic | Shoulder | multi-axial, ~90° abduction typical |
| Hip resurfacing | Prosthetic | Hip | multi-axial, ~120° |
| Automotive ball joint | Mechanical | Steering/suspension | multi-axial, ~40° angular |
| Rod-end (heim) joint | Mechanical | Control linkages | multi-axial, ~30–45° |
| Spherical plain bearing | Mechanical | Shafts and linkages | multi-axial, angular misalignment up to ~40° |
| Camera ball head | Mechanical | Tripod mount | 360° pan, ~90° tilt |
| Ball-and-socket swivel mount | Mechanical | Mounts and fixtures | 360° rotation, ~90° tilt |
| Mammalian shoulder (other animals) | Other animal | Forelimb/shoulder | multi-axial, species-dependent |
| Bird shoulder | Other animal | Wing/shoulder | multi-axial, often near 180° |
| Quadruped hip (dog/horse) | Other animal | Hip/pelvis | multi-axial, ~100–120° |
| Spherical joint in robotics | Mechanical | Robotic limbs and links | multi-axial, design-dependent |
Images and Descriptions
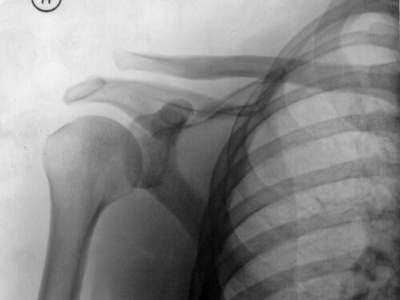
Shoulder
A synovial ball-and-socket where the humeral head fits the glenoid fossa; located at the shoulder. It allows multi-axial movement—flexion, abduction and rotation up to about 180°—and is notable for high mobility but instability and common dislocation risk.
Hip
The hip is a deep ball-and-socket between the femoral head and acetabulum at the hip; it permits weight-bearing multi-axial motion with about 120° flexion and stable rotation. Clinically notable for osteoarthritis and frequent total hip replacements.
Total hip replacement
A prosthetic ball-and-socket implant replacing the native hip joint; metal or ceramic head articulates with a polyethylene or metal cup. Designed to restore multi-axial ROM (~120° flexion) and relieve pain; engineers worry about wear, loosening and dislocation.
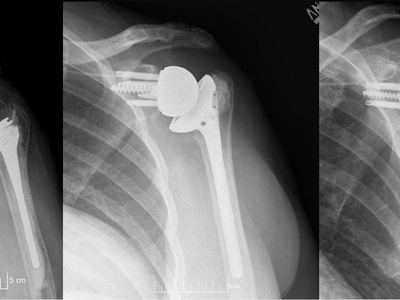
Reverse shoulder arthroplasty
A prosthetic design that reverses ball-and-socket geometry—ball on the scapular side and socket on the humerus—to improve deltoid mechanics. Located at the shoulder; restores function in cuff-deficient shoulders with multi-axial movement but altered ROM, often up to about 90° abduction.
Hip resurfacing
A bone-conserving arthroplasty where a metal cap covers the femoral head and mates with a socket; preserves native geometry and multi-axial motion (~120°). Notable for activity preservation in younger patients but concerns about metal wear and patient selection.

Automotive ball joint
A mechanical spherical joint that connects control arms to steering knuckles; located in car suspension. It permits steering and suspension travel with limited multi-axial angular misalignment (~40°) and is notable for wear, boot failure and common replacement maintenance.

Rod-end (heim) joint
A compact spherical bearing used in linkages and control rods; the male spherical head swivels in an eye-shaped socket. It allows angular misalignment (~30–45°) and rotation, and is prized for compact, adjustable mechanical articulation in aerospace and motorsport.
Spherical plain bearing
A bearing with a concave inner ring and convex outer surface allowing rotation and angular misalignment; used in heavy machinery linkages. It provides smooth multi-axial motion (angular misalignment up to ~40°) under load and resists shock when designed correctly.

Camera ball head
A photographic tripod head that clamps a spherical ball in a socket to allow rapid multi-axial orientation. It offers 360° pan and about 90° tilt with a single locking knob; notable for speed, compactness and occasional slippage under heavy loads.
Ball-and-socket swivel mount
Small adjustable mounts used for lamps, monitors or instruments; a spherical stud sits in a socket and locks with a clamp. They allow multi-axial aiming (typically 360° rotation and ~90° tilt) and are favored for flexible positioning and simplicity.
Mammalian shoulder (other animals)
The ball-and-socket shoulder in many mammals—from dogs to primates—sits at the forelimb girdle and permits multi-axial limb movement for locomotion or manipulation. Mobility varies by species; primates show expanded ROM for climbing and tool use.

Bird shoulder
A ball-and-socket-like glenohumeral joint in birds allows the wing to rotate through a large arc during flight. Located at the shoulder, it supports powerful multi-axial motion—often near 180°—and is biomechanically adapted for lift, thrust and wing-folding.

Quadruped hip (dog/horse)
The coxofemoral joint in quadrupeds is a ball-and-socket hip adapted for weight-bearing and propulsion. Located at the pelvis, it allows multi-axial motion (~100–120° depending on species) and is commonly affected by dysplasia in dogs and arthritis in horses.
Spherical joint in robotics
Robotic and animatronic systems use engineered ball-and-socket joints to reproduce compact multi-axial motion. Location varies by link, and ROM is design-dependent; notable engineering considerations include load capacity, actuation, backlash and sealing for longevity.